|
Flexiv RDK APIs
1.9.0
|
|
Flexiv RDK APIs
1.9.0
|
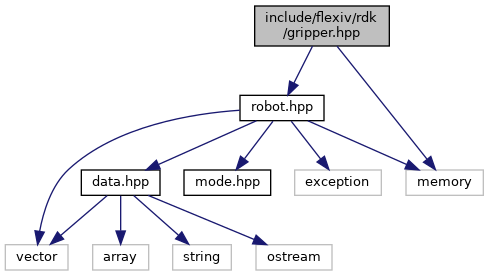
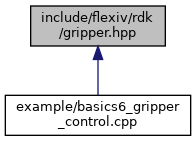
Go to the source code of this file.
Classes | |
| struct | flexiv::rdk::GripperParams |
| Data structure containing the gripper parameters. More... | |
| struct | flexiv::rdk::GripperStates |
| Data structure containing the gripper states. More... | |
| class | flexiv::rdk::Gripper |
| Interface to control the gripper installed on the robot. Because gripper is also a type of robot device, this API uses the same underlying infrastructure as rdk::Device, but with functions tailored specifically for gripper controls. More... | |
Functions | |
| std::ostream & | flexiv::rdk::operator<< (std::ostream &ostream, const GripperStates &gripper_states) |
| Operator overloading to out stream all members of GripperStates in JSON format. More... | |
Definition in file gripper.hpp.
| std::ostream& flexiv::rdk::operator<< | ( | std::ostream & | ostream, |
| const GripperStates & | gripper_states | ||
| ) |
Operator overloading to out stream all members of GripperStates in JSON format.
| [in] | ostream | Ostream instance. |
| [in] | gripper_states | GripperStates data structure to out stream. |